UCバークレー、これまでに見たことがない物体を機械学習によって最良の掴み方を選択し実行するロボティクス・システム「Dex-Net」を発表
BRANK
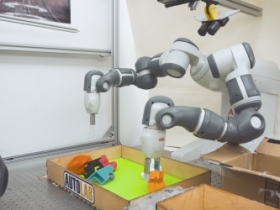
カリフォルニア大学バークレー校の「AUTOLAB」は、これまでに見たことのないオブジェクトを機械学習で把握し、そして掴み移動させるロボットアーム・ロボティクス・システム「Dex-Net」を発表しました。
カリフォルニア大学バークレー校の「AUTOLAB」は、これまでに見たことのないオブジェクトを機械学習で把握し、そして掴み移動させるロボットアーム・ロボティクス・システム「Dex-Net」を発表しました。